Dobierz drukarkę - Przejdź 3 kroki i wybierz produkt idealny dla Ciebie


Opis produktu
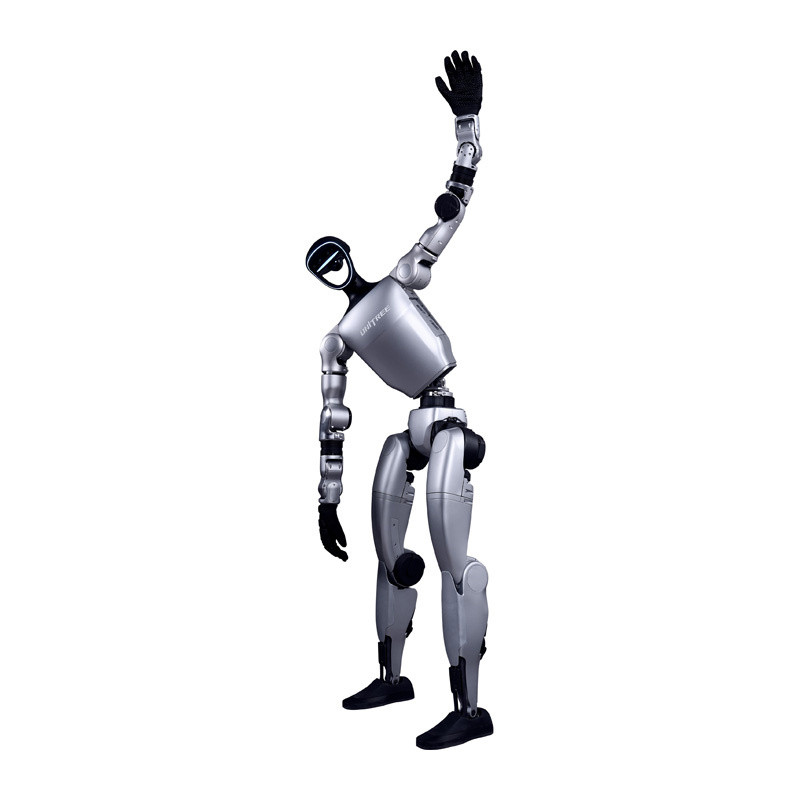
Unitree G1 Basic to nowoczesny robot humanoidalny, który może być wykorzystywany do badań nad ruchem, systemami sterowania, percepcją trójwymiarową i interakcją człowiek–maszyna. Jednocześnie jego rozbudowane możliwości ruchowe czynią go atrakcyjnym narzędziem demonstracyjnym. Mierzy około 130 cm i waży 35 kg, a mimo kompaktowych rozmiarów imponuje zdolnościami motorycznymi. Dzięki 23 stopniom swobody i prędkości sięgającej 2 m/s z łatwością wykonuje skomplikowane sekwencje – potrafi tańczyć, skakać, biegać i reagować na otoczenie w czasie rzeczywistym.
Jedną z głównych cech modelu G1 Basic jest jego wyjątkowa swoboda poruszania się, znacznie przewyższająca możliwości klasycznych maszyn przemysłowych. Ten humanoid bez trudu biega, skacze, wchodzi po schodach, wykonuje dynamiczne ruchy inspirowane tańcem i sztukami walki, a także potrafi natychmiast zmieniać pozycję bez utraty równowagi. Dzięki 23 stopniom swobody i szerokiemu zakresowi ruchu jego działania są płynne, naturalne i doskonale zsynchronizowane. To otwiera nowe możliwości w testach, pokazach i projektach badawczych, które wymagają realistycznej dynamiki oraz precyzyjnej kontroli ruchu.

Robot Unitree G1 Basic został stworzony tak, aby zachować stabilność nie tylko na gładkich powierzchniach, lecz także w bardziej wymagającym terenie. Każda jego noga dysponuje sześcioma stopniami swobody, co umożliwia precyzyjne przenoszenie masy i natychmiastowe dostosowanie się do zmieniającego się podłoża. Konstrukcja pozwala na płynne poruszanie się po nierównościach, takich jak kamienie – bez utraty kontroli nad balansem czy kierunkiem ruchu. Dzięki temu urządzenie sprawdza się zarówno we wnętrzach, jak i na zewnątrz, dobrze ilustrując praktyczne możliwości humanoidalnych konstrukcji.

System ruchu robota oparto na silnikach PMSM z wewnętrznym rotorem o niskiej bezwładności, które odpowiadają za szybkie reakcje i stabilne sterowanie momentem. Maksymalny moment obrotowy kolana na poziomie 90 N·m pozwala na realizację dynamicznych ruchów, takich jak przysiady, skoki czy gwałtowne zmiany pozycji ciała. Ramiona oferują po pięć stopni swobody oraz udźwig sięgający około 2 kg, co umożliwia precyzyjną manipulację przedmiotami i wykonywanie złożonych gestów. Przemysłowe łożyska krzyżowe oraz podwójne enkodery w stawach zapewniają wysoką dokładność działania i powtarzalność ruchu.

System widzenia G1 Basic opiera się na połączeniu kamery głębi Intel RealSense D435i oraz czujnika 3D LiDAR Livox-MID360, co pozwala na uzyskiwanie szczegółowych informacji o otaczającej przestrzeni. Szeroki zakres widzenia i wysoka dokładność danych umożliwiają autonomiczną nawigację oraz precyzyjne planowanie ruchów. W efekcie robot skutecznie reaguje na przeszkody, interpretuje zmiany w otoczeniu i wykonuje zadania wymagające świadomości przestrzennej.

Za wymianę informacji głosowych odpowiada rozbudowany system audio, który umożliwia swobodną i intuicyjną interakcję z użytkownikami. Cztery mikrofony z aktywną redukcją szumów i tłumieniem echa skutecznie wychwytują komendy głosowe nawet w wymagających warunkach akustycznych, a głośnik stereo o mocy 5 W zapewnia klarowne przekazywanie informacji zwrotnych. Taka forma interakcji sprawia, że robot staje się pełnoprawnym uczestnikiem dialogu człowiek–maszyna.

G1 Basic to coś więcej niż robot wykonujący zaprogramowane sekwencje ruchów. Został zaprojektowany jako platforma gotowa do pracy z algorytmami sztucznej inteligencji. Obsługuje zarówno uczenie przez naśladowanie, jak i uczenie ze wzmocnieniem, dzięki czemu potrafi rozwijać swoje umiejętności w oparciu o obserwację i zdobywane doświadczenie. W połączeniu z koncepcją UnifoLM – autorskim, wielkoskalowym modelem Unitree – urządzenie staje się nośnikiem AI, która funkcjonuje bezpośrednio w fizycznym otoczeniu. To solidna podstawa dla rozwoju przyszłych generacji inteligentnych robotów i autonomicznych asystentów.

Inteligentny akumulator o pojemności 9000 mAh został zaprojektowany z myślą o intensywnej, dynamicznej pracy. Jedno naładowanie zapewnia nawet do około 2 godzin działania, co pozwala swobodnie testować możliwości robota lub prezentować je podczas pokazów. Przemyślany system szybkiego montażu umożliwia sprawną wymianę komponentu, ograniczając przerwy w pracy do absolutnego minimum.

Konstrukcja robota została zaprojektowana tak, aby ułatwiać nie tylko pracę, ale również transport i przechowywanie. Po złożeniu wymiary urządzenia wynoszą jedynie 69 × 45 × 30 cm. Tak niewielki rozmiar znacząco upraszcza przenoszenie robota między stanowiskami roboczymi, laboratoriami czy przestrzeniami prezentacyjnymi, a także jego bezpieczne przechowywanie.

| Producent | Unitree |
|---|---|
| Model | G1 Basic |
| Wymiary w pozycji stojącej | 1320 × 450 × 200 mm |
| Wymiary w pozycji złożonej | 690 × 450 × 300 mm |
| Waga (wliczając akumulator) | około 35 kg |
| Podstawowa moc obliczeniowa | 8-rdzeniowy procesor wysokiej wydajności |
| Czujniki i komunikacja | kamera głębi + 3D LIDAR |
| Mikrofony kierunkowe | tak |
| Głośnik stereo 5W | tak |
| WiFi 6, Bluetooth 5.2 | tak |
| Moduł wysokiej mocy obliczeniowej | brak |
| Kontroler manualny | tak |
| Aktualizacje OTA | tak |
| Łączna liczba stopni swobody | 23 |
|---|---|
| Pojedyncza noga | 6 |
| Talia | 1 |
| Pojedyncze ramię | 5 |
| Pojedyncza dłoń | brak |
| Łożyska stawów | przemysłowe krzyżowe łożyska rolkowe (wysoka precyzja, duża nośność) |
| Silniki stawów | silniki synchroniczne z magnesami trwałymi i wewnętrznym wirnikiem o niskiej bezwładności (lepsza szybkość reakcji i odprowadzanie ciepła) |
| Moment obrotowy stawu kolanowego | 90 N·m |
| Maksymalne obciążenie ramienia | około 2 kg |
| Długość łydki + uda | 0,6 m |
| Rozpiętość ramion | około 0,45 m |
| Talia | Z ±155° |
|---|---|
| Kolano | 0~165° |
| Biodro | P ±154°, R -30~+170°, Y ±158° |
| Pełne wewnętrzne prowadzenie okablowania | Tak |
| Enkoder stawów | podwójny enkoder |
| System chłodzenia | lokalne chłodzenie powietrzem |
| Typ akumulatora | litowy (13 ogniw) |
|---|---|
| Możliwość szybkiej wymiany | Tak |
| Pojemność | 9000 mAh |
| Ładowarka | 54V 5A |
| Czas pracy | około 2 godziny |
Opinie o produkcie
Specyfikacja
Importer
Kraj: PL
Ulica: Rudzka 65c
Kod pocztowy: 44-200
Miasto: Rybnik
Producent
Kraj: CN
Ulica: Fengda Creative Park 88 / Bud. 1, p. 3
Kod pocztowy: 310051
Miasto: Hangzhou
e-mail: sales_global@unitree.cc